
ลองพิจารณาสร้างยานพาหนะตีนตะขาบที่มีการออกแบบพื้นฐานที่สามารถประกอบได้ภายในเวลาเย็นสองสามวัน โครงสร้างทั้งหมดสามารถแบ่งคร่าวๆ ได้เป็นสองส่วน - แชสซีแบบติดตามและชิ้นส่วนไฟฟ้า ซึ่งจะให้การควบคุมระยะไกลของเครื่องจากรีโมทคอนโทรล
การผลิตแชสซี
ไม่จำเป็นต้องใช้วัสดุจำนวนมาก: รางรถไฟจะถูกขับเคลื่อนด้วยมอเตอร์เกียร์คู่หนึ่ง พื้นฐานของโครงสร้างทั้งหมดจะเป็นไม้อัดหนาชิ้นเล็ก ๆ และคุณจะต้องมีล้อพลาสติกหลายล้อที่ใช้สำหรับหมุนรางรถไฟ สำหรับเครื่องจักร คุณสามารถใช้มอเตอร์เกียร์ที่มีขนาดเหมาะสมได้เกือบทุกประเภท โดยมอเตอร์ "สีเหลือง" นั้นเหมาะอย่างยิ่งซึ่งหาซื้อได้ตามร้านอะไหล่วิทยุหลายแห่งหรือหาซื้อได้ที่ Ali โดยกระปุกเกียร์ในนั้นจะให้อัตราทดเกียร์ 1: 48 ซึ่งในกรณีนี้คือค่าที่เหมาะสมที่สุด

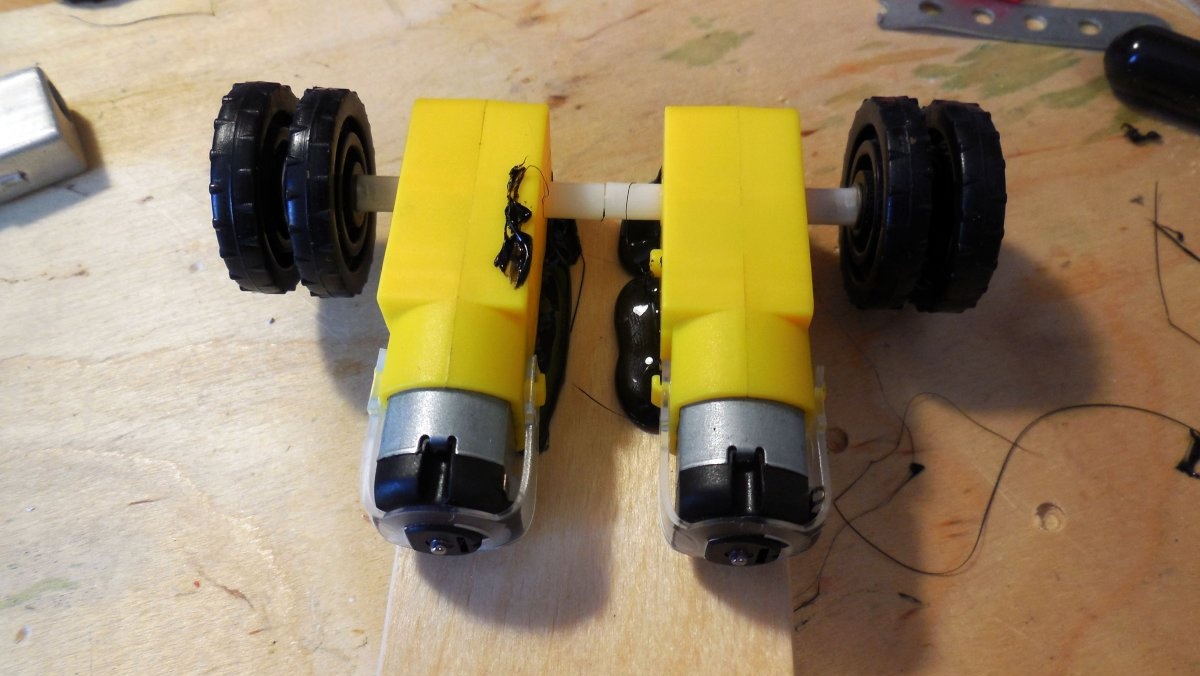
กระปุกเกียร์แต่ละตัวมีเอาต์พุตไปยังสองเพลาบนด้านตรงข้ามของตัวเครื่อง - สำหรับแชสซีแบบติดตาม จะใช้เพลาเดียวจากมอเตอร์แต่ละตัวเท่านั้น เพลาที่สองสามารถถอดออกทั้งหมดหรือปล่อยทิ้งไว้ในกรณีที่มอเตอร์เหล่านี้ยังจำเป็นในโครงการอื่นจำเป็นต้องขันล้อเข้ากับเพลา - วิธีที่ง่ายที่สุดในการทำเช่นนี้คือการขันสกรูเกลียวปล่อยเข้ากับเพลาเอง (ข้างในกลวง) เพื่อให้ล้อยึดได้ดี สำหรับการยึดเพิ่มเติมและเพื่อป้องกันไม่ให้สกรูเกลียวปล่อยคลี่ออก คุณสามารถหล่อลื่นข้อต่อด้วยกาวได้ โปรดทราบว่าล้อนั้นเป็นสองเท่า - แต่ละล้อมีช่องว่างประมาณ 3-4 มม. ในอนาคตหนอนผีเสื้อจะได้รับการแก้ไขด้วย

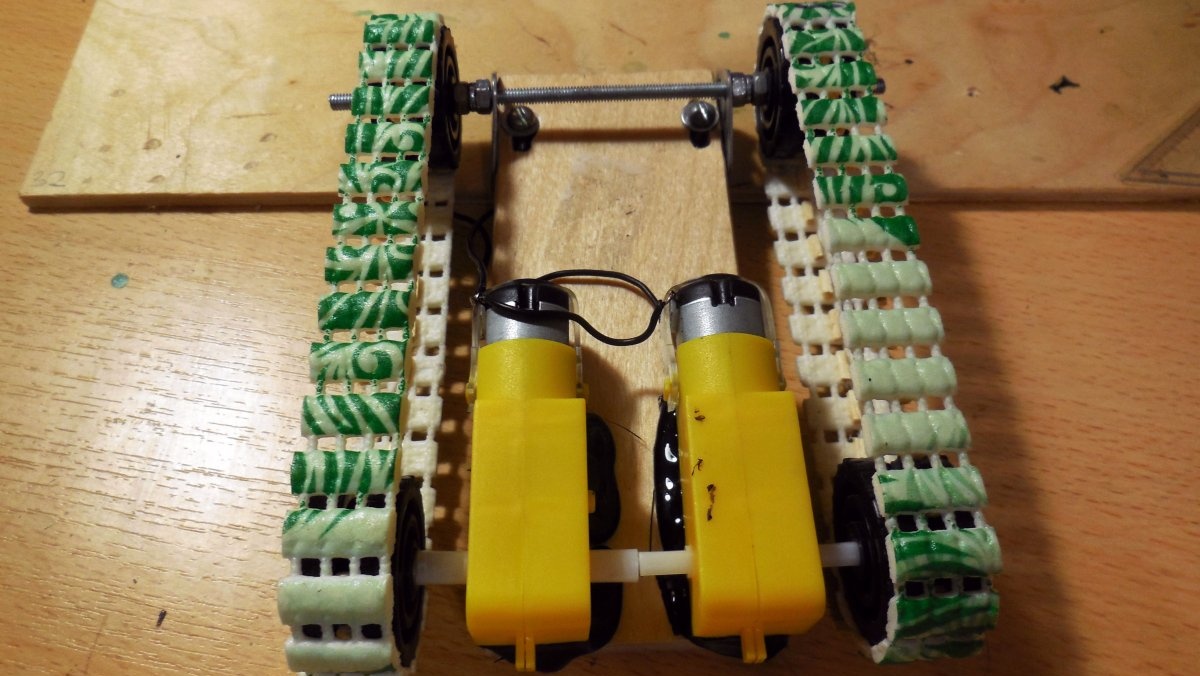
มอเตอร์ติดตั้งอยู่บนแผ่นไม้อัดที่ทนทาน สามารถเลือกขนาดได้ตามใจชอบ ขึ้นอยู่กับขนาดเครื่องที่ต้องการ มอเตอร์เกียร์เหล่านี้ไม่มีที่ที่สะดวกสำหรับการยึดดังนั้นฉันจึงแก้ไขด้วยกาวร้อน - แท่งกาวที่ดีให้คุณภาพการเชื่อมต่อที่ดีเยี่ยมดังที่ประสบการณ์ได้แสดงให้เห็น
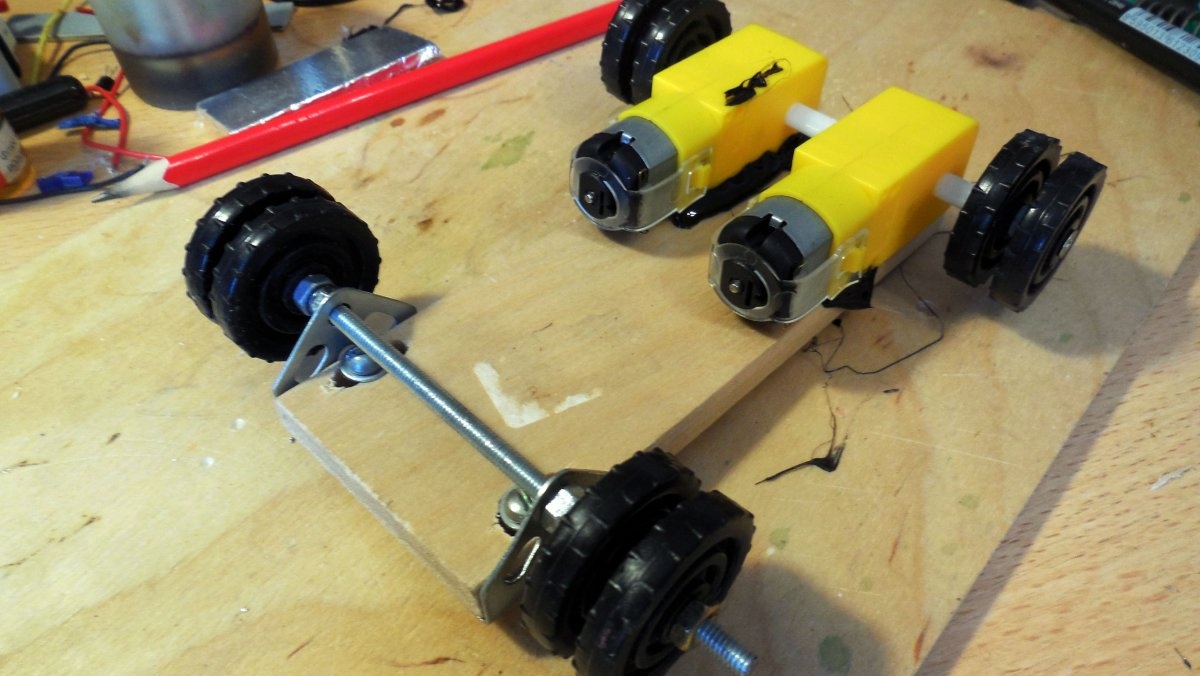
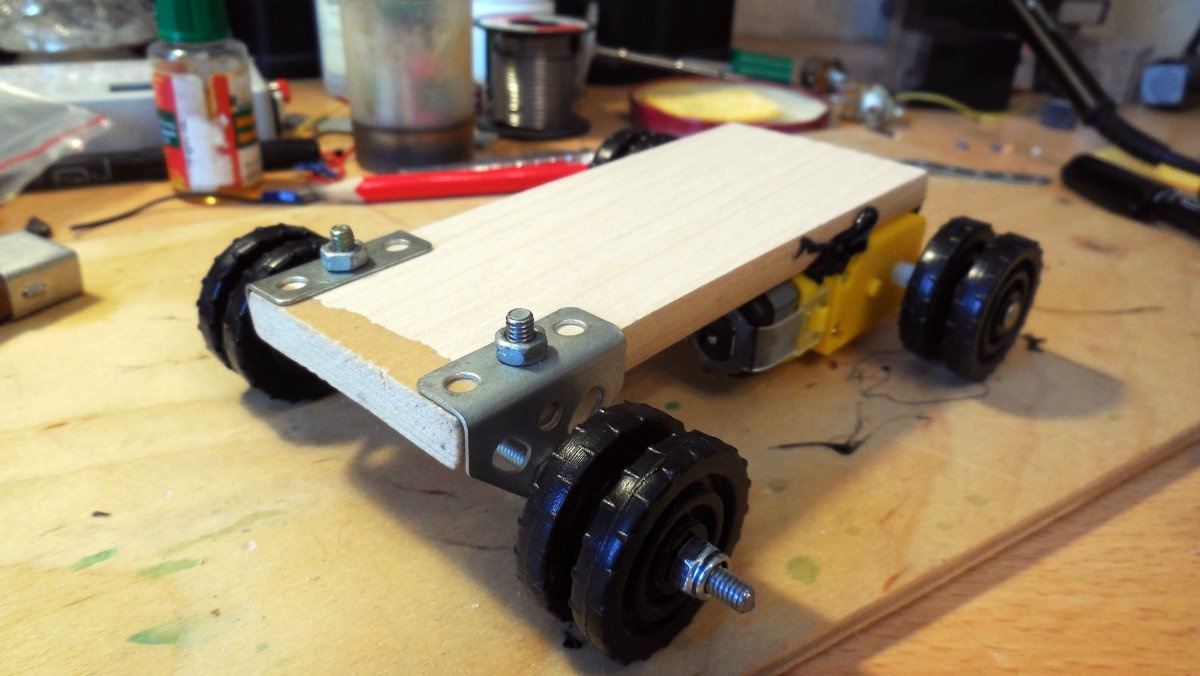
ถัดไปที่ด้านตรงข้ามของมอเตอร์คุณจะต้องยึดมุมสำหรับเพลาของล้อหน้าให้แน่น ในการทำเช่นนี้ฉันขอแนะนำอย่างยิ่งให้ใช้ชิ้นส่วนจากชุดก่อสร้างเหล็กสำหรับเด็ก - คุณจะพบมุมสำเร็จรูปพร้อมรูที่นั่น เมื่อเจาะรูด้วยไม้อัดคุณต้องคำนึงว่าในอนาคตคุณจะต้องปรับความตึงของรางดังนั้นคุณต้องเจาะรูหลายรูที่ยาวประมาณ 1-1.5 ซม. ซึ่งต่อเป็นรูเดียว ช่องเป็นรูปสี่เหลี่ยมผืนผ้า ด้วยวิธีนี้ เพลาหน้าทั้งหมดจะเคลื่อนที่ไปมาและยึดเข้าที่

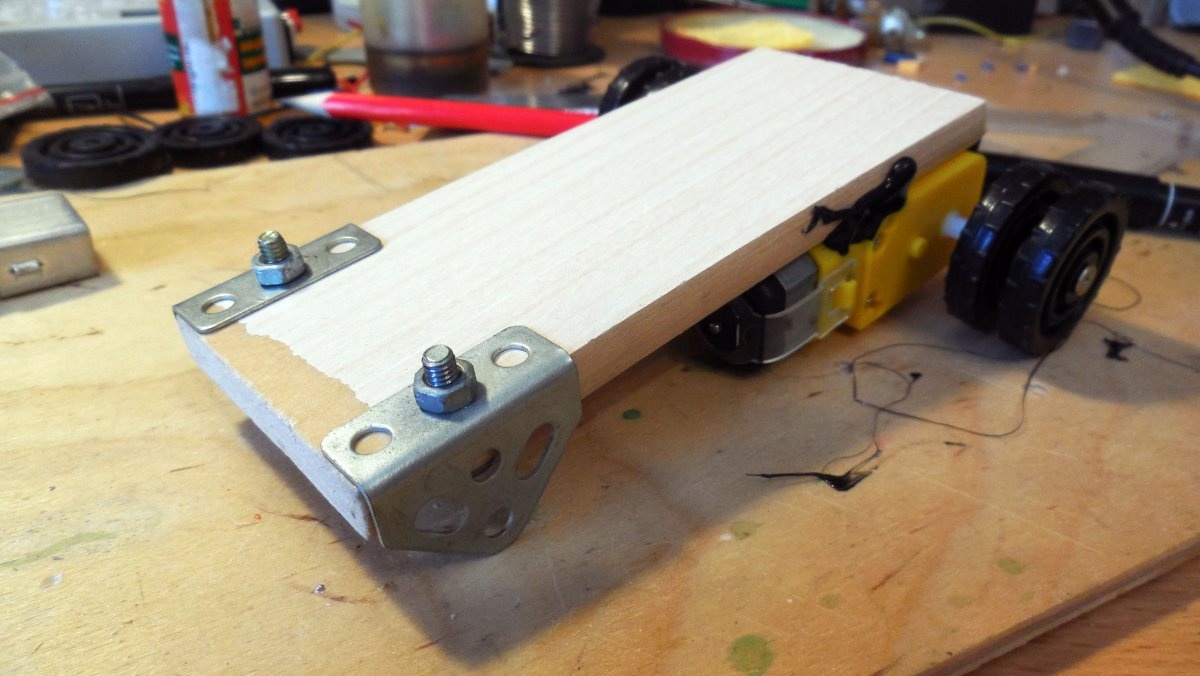
หมุดถูกเกลียวเข้าไปในรูที่มุม สะดวกในการใช้ M4 ให้ความแข็งแกร่งเพียงพอและในขณะเดียวกันก็พอดีกับรูในส่วนของตัวสร้างเหล็ก ต้องยึดแกนให้แน่นกับมุมสะดวกในการใช้น็อตล็อคสำหรับสิ่งนี้พวกเขาจะไม่คลายเกลียวด้วยตัวเองเมื่อเครื่องเริ่มเคลื่อนที่ มีการติดตั้งล้อคู่แบบเดียวกันที่ด้านข้างและด้านหลังโดยมีระยะห่างเท่ากันทุกประการล้อจะต้องหมุนอย่างอิสระบนเพลาซึ่งสามารถมั่นใจได้โดยใช้น็อตล็อคตัวเดียวกัน โปรดทราบว่าล้อซ้ายและขวาจะต้องหมุนแยกจากกัน ฉันเอาล้อเหล่านี้มาจากชุดโครงสร้างเหล็กเดียวกัน แต่คุณสามารถตัดล้อที่คล้ายกันออกจากพลาสติกหรือกระดาษแข็งหนาได้หากคุณพับหลายชั้นแล้วทากาวเข้าด้วยกัน
การทำตัวหนอน
เป็นการยากที่จะจินตนาการว่าแทร็กที่ยอดเยี่ยมพร้อมการยึดเกาะที่ดีนั้นสามารถทำจากเสื่ออาบน้ำ PVC ซึ่งหาซื้อได้ตามร้านฮาร์ดแวร์เกือบทุกแห่ง พรมดังกล่าวประกอบด้วย "แถบ" ที่ยืดหยุ่นจำนวนมากซึ่งเชื่อมต่อกันด้วยเกลียวคู่ขนานซึ่งเป็นสิ่งจำเป็นในการสร้างหนอนผีเสื้อ ตัดแถบกว้าง 1.5-2 ซม. จากเสื่อซึ่งควรเท่ากับความกว้างของล้อที่ใช้

จากนั้นคุณจะต้องติดเทปเข้ากับล้อที่ติดอยู่กับแชสซีแล้วตัดตามความยาวที่ต้องการจากนั้นปลายของเทปจะติดกาวเข้าด้วยกันด้วยกาวซุปเปอร์ หลังจากที่กาวแห้งคุณสามารถลองใช้ตัวหนอนบนแชสซีและแม้แต่เปิดมอเตอร์ - ตัวหนอนจะหมุน แต่จะหลุดออกจากล้ออย่างรวดเร็ว


เพื่อให้แน่ใจว่าหนอนผีเสื้อจะไม่หลุดออกจากล้อ แม้ว่ายานพาหนะในอนาคตจะวิ่งข้ามสิ่งกีดขวางก็ตาม คุณจำเป็นต้องทำให้ตัวหยุดนูนอยู่ตรงกลางของหนอนผีเสื้อ เมื่อหมุนจะตกลงไปในช่องว่างระหว่างล้อทำให้รางหลุดออกมา มีหลายวิธีในการหยุดเช่นนี้ ฉันตัดสินใจติดไม้ขีดกับ "ขั้นตอน" ของตัวหนอนแต่ละอัน ตามประสบการณ์ที่แสดงให้เห็นวิธีนี้กลับได้ผลและด้วยความตึงเครียดที่เพียงพอตัวหนอนก็ไม่หลุดเลย ไม้ขีดถูกตัดเป็นชิ้นยาว 5-6 มม. แล้วติดกาว ดังที่แสดงในภาพด้านล่าง มีการใช้กาวซุปเปอร์กาวชนิดเดียวกัน - ช่วยให้มั่นใจได้ถึงความแข็งแรงในการยึดเกาะที่ดีกับวัสดุแผ่นพีวีซี


ต้องทำแบบเดียวกันทั้งหมดกับตัวหนอนตัวที่สองหลังจากติดกาวไม้ขีดแล้ว รางก็ถือว่าพร้อมแล้ว - ตอนนี้ต้องใช้แชสซีและสามารถตรวจสอบได้ว่ารถในอนาคตจะขับเคลื่อนอย่างไรโดยจ่ายแรงดันไฟฟ้าจากแบตเตอรี่ไปยังมอเตอร์ทั้งสองโดยตรง หากจำเป็น คุณต้องปรับแรงดึง - แทร็กที่อ่อนเกินไปจะหมุนหรือหลุดออก และแทร็กที่แน่นเกินไปจะหมุนแน่น ทำให้เกิดความเครียดเพิ่มเติมกับมอเตอร์

ส่วนไฟฟ้า
ในส่วนของระบบไฟฟ้า คุณจะต้องใช้บอร์ดหลายแผงในคราวเดียว: แผงตัวรับและตัวส่งสัญญาณสำหรับส่งคำสั่งจากรีโมทคอนโทรล บูสต์คอนเวอร์เตอร์เพื่อจ่ายไฟให้กับมอเตอร์ รวมถึงบอร์ด "บริดจ์" เพื่อให้มอเตอร์แต่ละตัวหมุนได้ทั้งสองทิศทาง รูปแบบทั่วไปมีดังนี้ - บอร์ดตัวส่งสัญญาณจะถูกติดตั้งในรีโมทคอนโทรล, บอร์ดตัวรับบนตัวเครื่อง บูสต์คอนเวอร์เตอร์จะแปลงแรงดันไฟฟ้าจากแบตเตอรี่ (3.7 - 4.2 โวลต์) เป็นระดับ 7-8 โวลต์ ซึ่งจะใช้ขับเคลื่อนมอเตอร์ หากมอเตอร์พัฒนาความเร็วเพียงพอโดยตรงจากแบตเตอรี่ ก็ไม่จำเป็นต้องติดตั้งตัวแปลง การหมุนของมอเตอร์จะถูกควบคุมโดยวงจรบริดจ์ - วงจรพิเศษที่มีทรานซิสเตอร์เอฟเฟกต์สนามซึ่งสามารถจ่ายเอาต์พุตด้วยแรงดันไฟฟ้าขั้วหนึ่งหรืออีกขั้วหนึ่ง ขึ้นอยู่กับอินพุต (ใน 1 หรือใน 2) สัญญาณควบคุมจาก บอร์ดรับสัญญาณจะได้รับ ขั้นแรกเรามาดูวงจรเครื่องส่งและตัวรับซึ่งมีดังต่อไปนี้ตามลำดับ

เพื่อความแม่นยำวงจรเหล่านี้เรียกว่าตัวเข้ารหัสและตัวถอดรหัสและเครื่องรับและตัวส่งสัญญาณเป็นโมดูล RX-TX สำเร็จรูปที่ความถี่ 433 MHz ซึ่งหาซื้อได้ง่ายใน Ali หรือร้านอะไหล่วิทยุหลายแห่ง - แต่ละโมดูลมีหน้าสัมผัสสามช่องสำหรับการเชื่อมต่อ - กำลังบวก ลบ รวมถึงหน้าสัมผัส DATA สำหรับการส่งหรือรับข้อมูลวงจรอย่างง่ายที่นำเสนอข้างต้นมีโปรโตคอลการถ่ายโอนข้อมูล ช่วยให้คุณสามารถประมวลผลการกดปุ่ม 5 ปุ่ม ในการควบคุมเครื่องคุณจะต้องใช้เพียง 4 ช่อง (ไปข้างหน้า ถอยหลัง ขวา ซ้าย) ดังนั้นช่องที่ 5 จึงยังคงว่างและสามารถใช้เพื่อวัตถุประสงค์ใดก็ได้ เช่น การเปิดและปิดไฟหน้า หน้าสัมผัส TXD และ RXD ในไดอะแกรมเชื่อมต่อกับหน้าสัมผัส DATA ของเครื่องส่งและตัวรับ ตามลำดับ ไม่เช่นนั้น ไดอะแกรมจะเรียบง่ายและแทบไม่จำเป็นต้องมีคำอธิบาย แรงดันไฟฟ้าของวงจรคือ 3.5-5 โวลต์อย่างไรก็ตามหากคุณติดตั้งตัวปรับความเสถียร 78l05 (ระบุไว้ในแผนภาพ) คุณสามารถจ่ายไฟให้กับแรงดันไฟฟ้า 7 โวลต์ขึ้นไป แผงวงจรพิมพ์มีตัวเลือกพลังงานทั้งสองแบบคุณเพียงแค่ต้องติดตั้งจัมเปอร์ในตำแหน่งที่ถูกต้อง สำหรับใช้ในเครื่องจักร ทั้งเครื่องรับและเครื่องส่งสัญญาณสามารถจ่ายพลังงานจากแบตเตอรี่ได้โดยตรงโดยไม่มีสารเพิ่มความคงตัว แต่ละวงจรมีไมโครคอนโทรลเลอร์ - จะต้องแฟลชด้วยเฟิร์มแวร์ที่เหมาะสม เฟิร์มแวร์อยู่ในไฟล์เก็บถาวรพร้อมกับไฟล์บอร์ด
เก็บถาวรด้วยแผนผัง เฟิร์มแวร์ และบอร์ด:
การทำรีโมทคอนโทรล
คุณสามารถใช้รีโมตคอนโทรลสำเร็จรูปจากของเล่นควบคุมด้วยวิทยุที่ชำรุดหรือไม่จำเป็นได้ หากภายในนั้นมีพื้นที่เพียงพอสำหรับติดตั้งบอร์ดเข้ารหัส หรือคุณสามารถสร้างรีโมตคอนโทรลของคุณเองเหมือนที่ฉันเคยทำ ฉันใช้ไม้อัดอีกชิ้นเป็นฐาน โดยติดตั้งที่ยึดแบตเตอรี่ 18650 บอร์ดเข้ารหัสพร้อมโมดูลตัวรับ และปุ่ม 4 ปุ่มไว้บนนั้น เพื่อจัดเรียงให้ควบคุมได้ง่ายที่สุดโปรดทราบว่าบอร์ดเข้ารหัสมีพื้นที่สำหรับติดตั้งปุ่มบนบอร์ดอยู่แล้ว - ไม่จำเป็นต้องทำการติดตั้ง ยกเว้นเพื่อตรวจสอบการทำงานหลังการประกอบ ปุ่มการทำงานจะถูกถอดออกจากบอร์ดด้วยสายไฟดังภาพด้านล่าง


การติดตั้งอุปกรณ์อิเล็กทรอนิกส์บนแชสซี
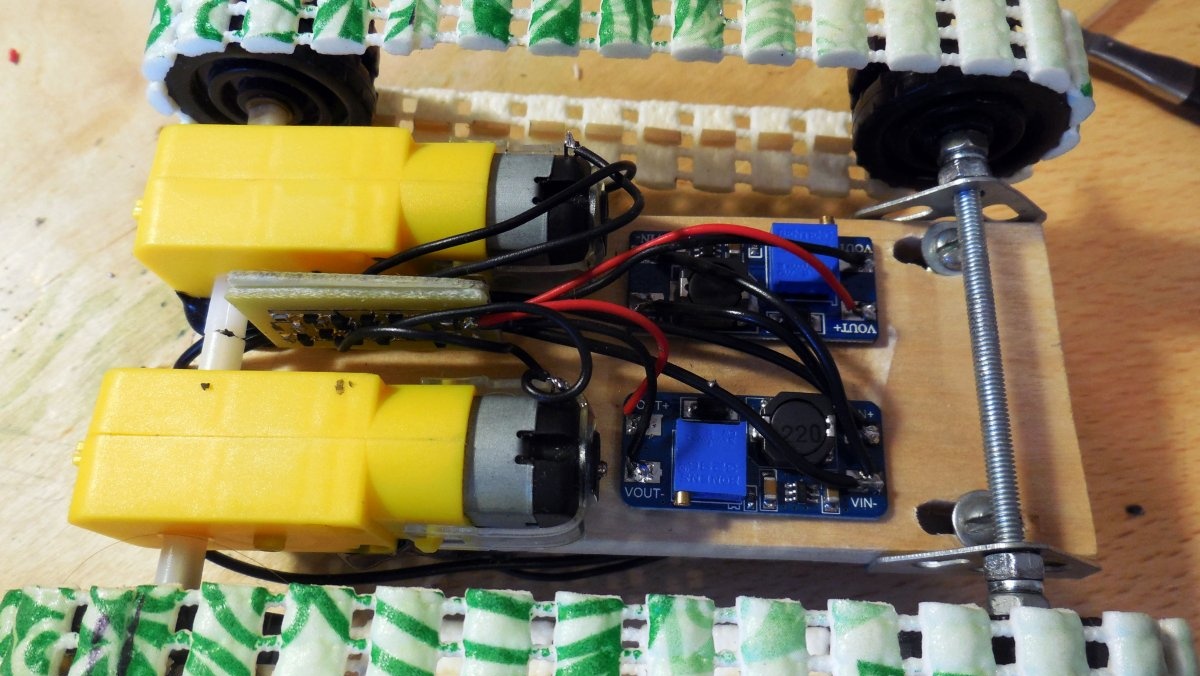
ดังนั้นบนตัวถังนั้นนอกเหนือจากบอร์ดถอดรหัสที่มีโมดูลตัวรับแล้วจะมีการติดตั้งบอร์ด "บริดจ์" สองตัวและตัวแปลงสองตัว ข้อดีของการใช้ตัวแปลงสองตัว ตัวหนึ่งสำหรับมอเตอร์แต่ละตัว คือคุณสามารถปรับความเร็วของแต่ละแทร็กแยกกันได้ แม้ว่าเกียร์มอเตอร์จะเหมือนกัน แต่ก็ยังมีการเปลี่ยนแปลงพารามิเตอร์อยู่บ้าง ดังนั้นถึงแม้จะมีแรงดันไฟฟ้าเท่ากัน แต่ก็สามารถสร้างความเร็วที่แตกต่างกันเล็กน้อย โดยการปรับแรงดันไฟฟ้าที่เอาต์พุตของคอนเวอร์เตอร์ คุณสามารถบรรลุความเร็วเท่ากันได้ ความเร็วที่บิดเบี้ยวแม้แต่น้อยก็จะนำไปสู่ความจริงที่ว่ารถจะไม่ขับตรงไปข้างหน้า แต่จะมีการเลี้ยวเล็กน้อย ด้านล่างของรูปภาพ คุณจะเห็นบอร์ดทั้งหมดที่จำเป็นสำหรับการติดตั้งบนแชสซี

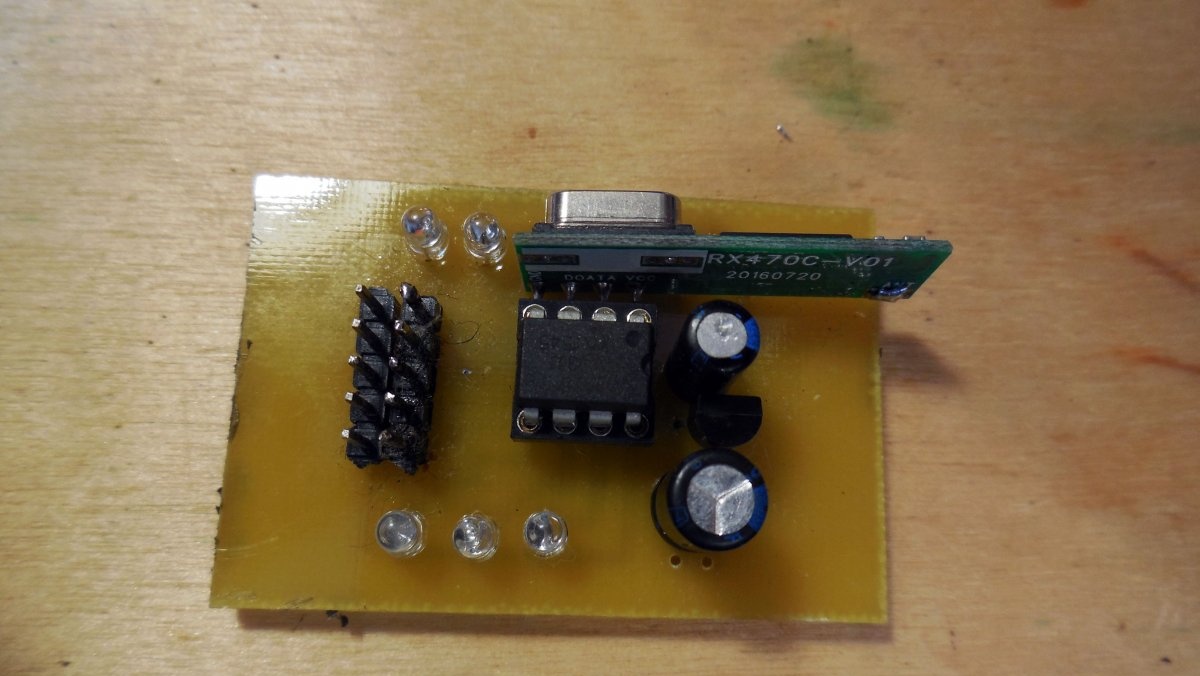
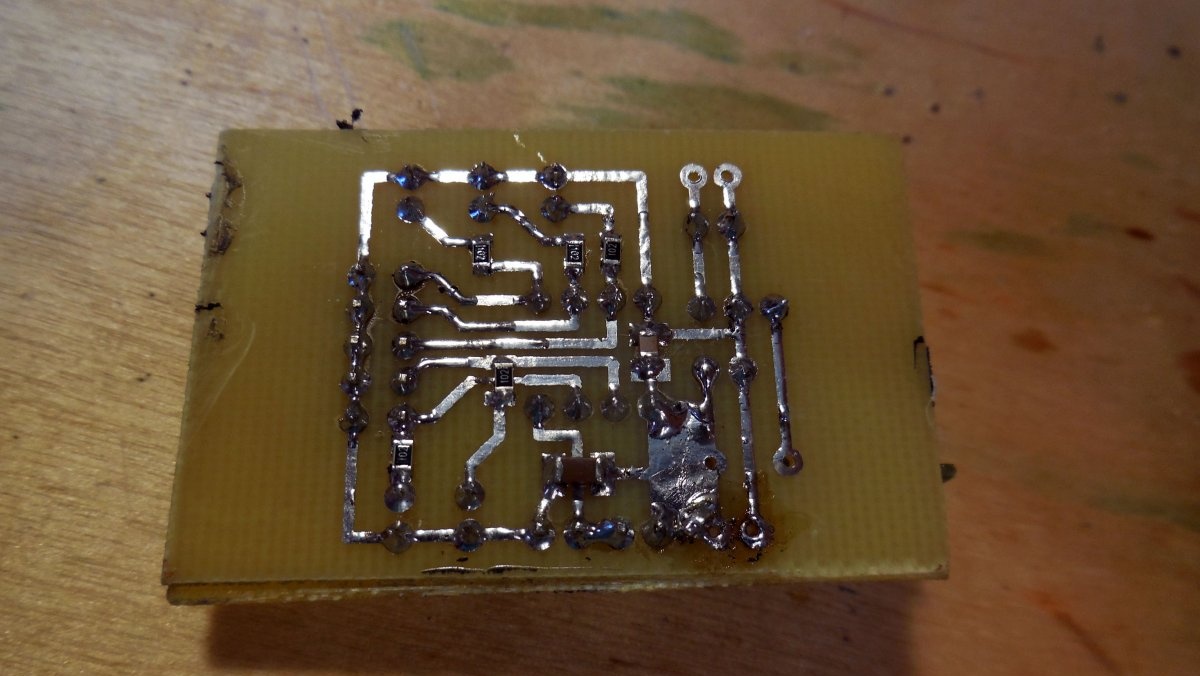
ภาพรายละเอียดของบอร์ดถอดรหัส โปรดทราบว่าเช่นเดียวกับบอร์ดเข้ารหัสมีตัวเก็บประจุแหล่งจ่ายไฟเพิ่มเติมหลายตัวซึ่งจะไม่ฟุ่มเฟือยในอุปกรณ์ที่มีไมโครคอนโทรลเลอร์อย่างแน่นอน
การประกอบวงจรบริดจ์
ดูเหมือนว่าเหตุใดจึงจำเป็นต้องใช้วงจรบริดจ์บางประเภทเนื่องจากเพียงใช้กุญแจจ่ายแรงดันไฟฟ้าให้กับมอเตอร์ก็เพียงพอแล้ว และไม่จำเป็นจริงๆหากรถไม่ต้องการเกียร์ถอยหลัง - และการฝึกฝนแสดงให้เห็นว่าหากไม่มีมันก็ไม่น่าสนใจเลย ดังนั้นจึงจำเป็นต้องประกอบวงจรเพิ่มเติมขนาดเล็กที่จะทำให้เกิดการเปลี่ยนแปลงขั้วของมอเตอร์ ขั้วเปลี่ยนไป - ทิศทางการเคลื่อนที่เปลี่ยนไป

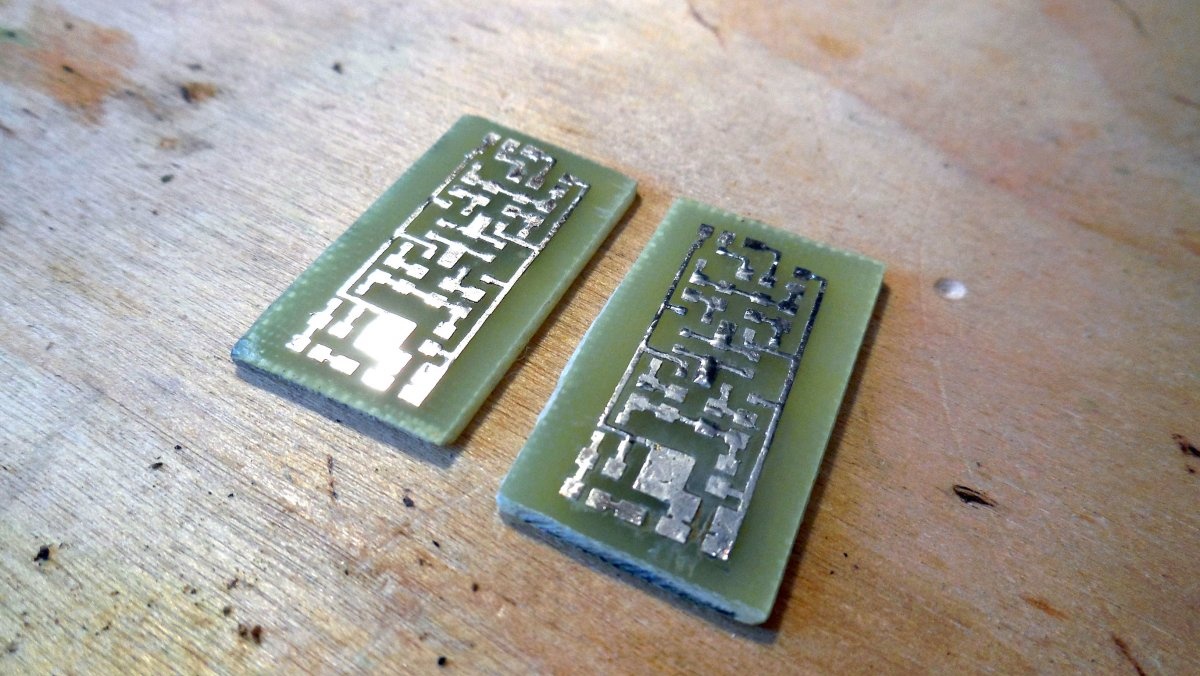
มอเตอร์เชื่อมต่อกับวงจรนี้ และยังมีอินพุตสองช่อง - in1 และ in2, ใช้ไฟ 3-5 โวลต์กับอินพุตหนึ่ง - มอเตอร์หมุนไปในทิศทางเดียว, ใช้ไฟ 3-5 โวลต์กับอีกอินพุต - มอเตอร์หมุนไปในทิศทางอื่น ทิศทาง. หากไม่ได้จ่ายแรงดันไฟฟ้าให้กับอินพุตใดอินพุตหนึ่ง หรือจ่ายไปที่อินพุตทั้งสองพร้อมกัน มอเตอร์จะไม่หมุน นี่เป็นตรรกะง่ายๆ ของการทำงาน ในวงจรมีทรานซิสเตอร์ฟิลด์เอฟเฟกต์ 4 ตัวที่จะสับเปลี่ยนมอเตอร์ ดังนั้นจึงต้องออกแบบให้มีกระแสไฟฟ้าสูงเพียงพอ สองอันคือ N-channel คุณสามารถใช้ AO3400 และอีกสองอันคือ P-channel AO3401 เหมาะสม นอกจากนี้ในแผนภาพยังมีทรานซิสเตอร์แบบไบโพลาร์ NPN สองตัว BC847 หรือสิ่งอื่นที่คล้ายกันจะทำ เพื่อไม่ให้ใช้พื้นที่บนแชสซีมากนัก ฉันแนะนำให้ประกอบวงจรนี้โดยใช้ส่วนประกอบ SMD ไดโอด - สิ่งที่คุณต้องการเช่น 1N4148W กำลังไฟฟ้าเข้าของวงจรนี้ (กำหนดเป็น 12 V) จ่ายให้กับแรงดันไฟฟ้าจากตัวแปลง โปรดทราบว่าจะต้องประกอบวงจรเป็นสองชุด - สำหรับมอเตอร์ด้านซ้ายและขวาตามลำดับจะขับเคลื่อนจากตัวแปลงตัวหนึ่งและจากตัวแปลงตัวที่สอง รูปถ่ายของบอร์ดที่ประกอบอยู่ด้านล่าง

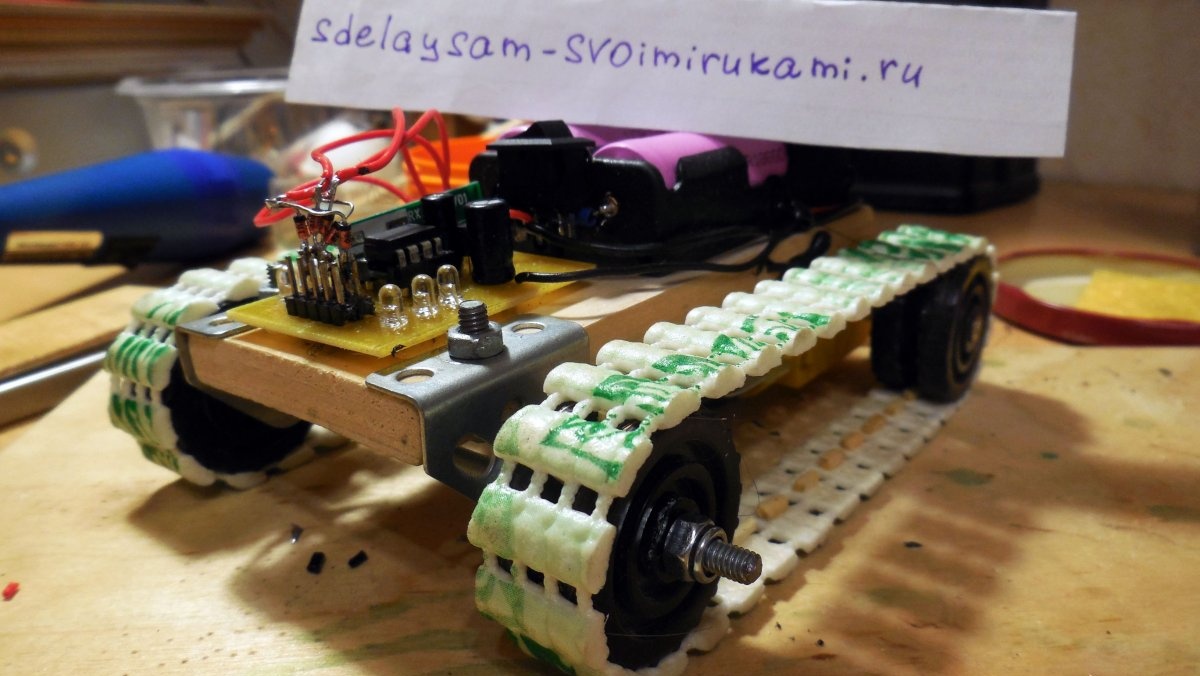
ตอนนี้คุณสามารถดำเนินการติดตั้งได้โดยตรง - และขั้นตอนแรกคือติดตั้งที่ยึดคู่สำหรับแบตเตอรี่ 18650 ที่ด้านบนของแชสซี อุปกรณ์อิเล็กทรอนิกส์ทั้งหมดจะใช้พลังงานจากแบตเตอรี่เหล่านั้น โดยแบตเตอรี่จะเชื่อมต่อแบบขนาน

ด้านหน้าของแบตเตอรี่มีการติดตั้งบอร์ดถอดรหัสที่ส่วนหน้าซึ่งสามารถเชื่อมต่อได้ทันทีผ่านสวิตช์ไปยังหน้าสัมผัสของที่ยึด เพื่อความสะดวก บอร์ดนี้มี 5 เพิ่มเติม ไฟ LED – เมื่อคุณกดปุ่มรีโมตคอนโทรล ปุ่มที่เกี่ยวข้องจะสว่างขึ้น ไฟ LED.

คอนเวอร์เตอร์คู่หนึ่งและบอร์ดบริดจ์หนึ่งคู่ติดอยู่ที่ส่วนล่างใต้แชสซีทุกอย่างเชื่อมต่อกันทันทีด้วยสายไฟ - อินพุตของคอนเวอร์เตอร์ผ่านสวิตช์ไปยังที่ยึด, เอาต์พุตของคอนเวอร์เตอร์เพื่อจ่ายไฟให้กับแผงบริดจ์และเอาต์พุตของบริดจ์ไปยังมอเตอร์ตามลำดับ ควรคำนึงว่ามอเตอร์ที่โหลดสามารถใช้กระแสไฟฟ้าได้ค่อนข้างมากดังนั้นที่อินพุตของตัวแปลงกระแสไฟฟ้าที่ใช้จะมากกว่าประมาณ 2 เท่าและในบางช่วงเวลาอาจถึง 1-1.5 แอมแปร์ดังนั้นคุณต้อง จ่ายไฟด้วยสายไฟที่ค่อนข้างหนา

ขั้นตอนสุดท้ายของการประกอบยังคงอยู่ - คุณต้องเชื่อมต่อเอาต์พุตตัวถอดรหัส (จะใช้เอาต์พุต 4 จาก 5 ตัว) เข้ากับอินพุตบริดจ์ (in1, in2) เพื่อที่ว่าเมื่อคุณกดปุ่มบางปุ่มบนรีโมทคอนโทรล เครื่อง ตอบสนองไปในทางที่ต้องการ กล่าวคือ:
- การกด "ไปข้างหน้า" - มอเตอร์ทั้งสองหมุนไปในทิศทางเดียวกัน
- การกด "ย้อนกลับ" - มอเตอร์ทั้งสองหมุนไปในทิศทางตรงกันข้าม
- การกด "ขวา" - มอเตอร์ด้านซ้ายจะหมุนไปข้างหน้า มอเตอร์ด้านขวาจะหมุนไปข้างหลัง ในขณะที่เครื่องจะหมุนตามเข็มนาฬิกาอยู่กับที่
- การกด "ซ้าย" - มอเตอร์ด้านขวาจะหมุนไปข้างหลัง มอเตอร์ด้านซ้ายจะหมุนไปข้างหน้า เครื่องจะหมุนทวนเข็มนาฬิกา
- การกด "ไปข้างหน้า" และ "ขวา" พร้อมกัน - มอเตอร์ด้านซ้ายหมุนไปข้างหน้า ส่วนด้านขวาหยุดนิ่ง จึงเกิดการเลี้ยวที่ราบรื่น
- การกด "ไปข้างหน้า" และ "ซ้าย" พร้อมกันจะคล้ายกัน แต่ไปในทิศทางอื่น
ในการใช้ลอจิกดังกล่าว จำเป็นต้องเชื่อมต่อเอาต์พุตตัวถอดรหัสเข้ากับอินพุตบริดจ์ดังที่แสดงด้านล่าง
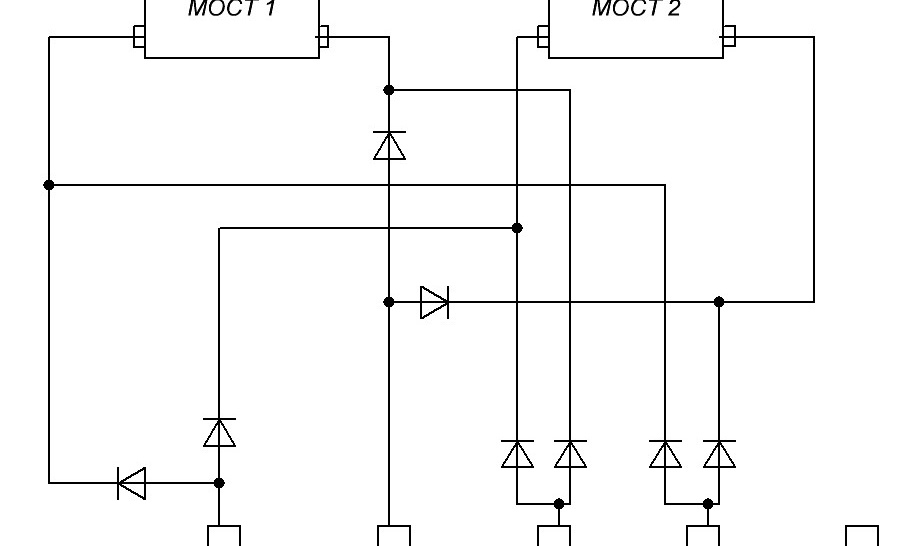
เอาต์พุตตัวถอดรหัสแสดงอยู่ด้านล่าง โดยเอาต์พุตตัวใดตัวหนึ่งว่างและสามารถใช้สำหรับการทำงานอื่นๆ ได้ ไดโอดที่นี่สามารถใช้ 1N4148 เดียวกันได้ โดยบัดกรีโดยการติดตั้งบนพื้นผิวโดยตรงที่เอาต์พุตตัวถอดรหัส
การทดสอบ
ณ จุดนี้การประกอบเครื่องเสร็จสมบูรณ์คุณสามารถใส่แบตเตอรี่และตรวจสอบการทำงานได้ ในกรณีนี้การตรวจสอบการสิ้นเปลืองกระแสไฟไม่ใช่เรื่องผิด - ในกรณีที่ไม่มีคำสั่งจากรีโมทคอนโทรลก็ควรจะมีขนาดเล็กประมาณหลายสิบ mA ระยะของรีโมทคอนโทรลจะขึ้นอยู่กับโมดูลตัวรับและตัวส่งสัญญาณที่ใช้ - ส่วนใหญ่มักจะให้พื้นที่รับสัญญาณที่เชื่อถือได้ประมาณ 20-30 เมตรในสภาพเมืองซึ่งเพียงพอที่จะควบคุมเครื่องได้ เสาอากาศจะช่วยเพิ่มช่วงได้อย่างมาก คุณสามารถนำลวดทองแดงที่มีความยาว 17 ซม. (สำหรับความถี่ 433 MHz) มาบัดกรีเข้ากับหน้าสัมผัส "มด" ของโมดูล


ดังนั้นผลลัพธ์ที่ได้คือของเล่นที่สนุกสนานมากสำหรับเด็กและผู้ใหญ่ - รางเสื่อ PVC ให้การยึดเกาะที่ดีเยี่ยมบนพื้นผิวใด ๆ ดังนั้นเครื่องจักรจึงสามารถเอาชนะอุปสรรคได้อย่างง่ายดาย ข้อดีของเวอร์ชันติดตามยังรวมถึงความง่ายในการควบคุม - ไม่จำเป็นต้องติดตั้งกลไกการบังคับเลี้ยวเพิ่มเติม การควบคุมทั้งหมดเกิดขึ้นโดยการเปลี่ยนทิศทางการหมุนของแทร็กเท่านั้น ข้อเสียของการออกแบบแชสซีที่อธิบายไว้สามารถเรียกได้ว่าเป็น "ระยะห่างจากพื้น" ขนาดเล็ก - มอเตอร์อยู่ใต้ด้านล่างและใช้พื้นที่ค่อนข้างมากอย่างไรก็ตามสิ่งนี้ไม่รบกวนความสุขในการ "ขับขี่" และหาก ต้องการข้อเสียนี้สามารถกำจัดได้โดยการเพิ่มเพลาเพิ่มเติมสำหรับล้อหลังและวางมอเตอร์ไว้ด้านบน ขอให้มีความสุขในการสร้าง!











